
ウェアラブル腕部アシストロボット

- 工学部 メカトロニクス工学科担当
- 助教 北野 雄大
- ホームページ »
- 山梨大学研究者総覧へ »
ウェアラブルロボットとは体に装着することで人の動きや生活を支援するロボットの総称である.中でもアクチュエータを用いて関節や筋肉の動きの補助することを目的とするロボットをウェアラブルアシストロボットと呼ぶ.人体は200個以上の骨格を適度に動かすことで実現されており,それら関節の数は産業用ロボットなどの実用化されているロボットと比べ非常に多く,アシストロボットには通常とは異なる動作機構が求められる.
本研究では人体の腕部動作すべての補助を目指し,一つの関節に対して複数のアクチュエータを取り付けたパラレルリンクアクチュエータを採用したアシストロボットの開発を行っている.同ロボットは各アクチュエータを適切に制御することで回転や並進を組み合わせた複雑な動きをさせることが可能である.
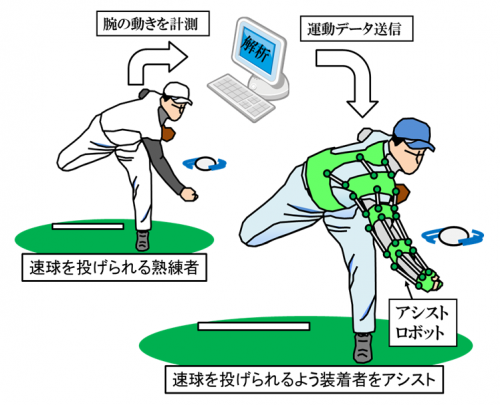
ウェアラブルアシストロボットの一例(ピッチング動作のアシスト)