ステレオカメラによる三次元環境認識

- 工学部 メカトロニクス工学科担当
- 准教授 丹沢 勉
- ホームページ »
- 山梨大学研究者総覧へ »
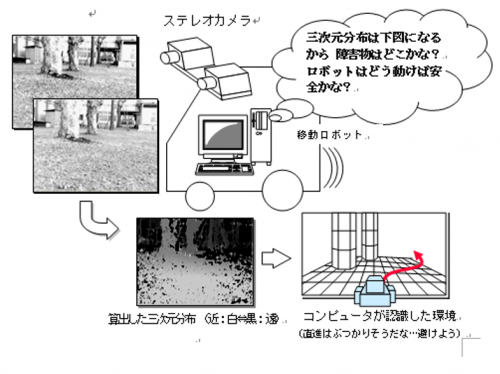
ステレオカメラは,人間の眼と同じように 2台のカメラを並べて固定したカメラシステムである.この2台のカメラで同一の対象物を撮像し,その画像を比較すると,視差(画像間での対象物の位置にズレ)が生じる.この視差により,人間の眼と同じようにコンピュータにも立体的に周囲環境を認識させることが可能となる.このステレオカメラは通常のカメラ画像(輝度・色情報)に加え3次元(奥行き)情報を利用できるため,これまでコンピュータでは難しかった複雑な環境でも高い信頼性での環境認識が可能となる.
本研究では,ロボットや車の眼としての開発,及び,適応範囲拡大のためにステレオカメラの低コスト化・測位精度の向上,アプリケーション開発などを行っている.