
生体解析と手術支援への応用

- 工学部 機械工学科担当
- 准教授 鍵山 善之
- ホームページ »
- 山梨大学研究者総覧へ »
超高齢社会を迎え,福祉・医療・科学捜査などの分野で,人体損傷の評価が重要になってきています.例えば,高齢化社会における介護・福祉分野において,それらの対策のひとつとして,サービスロボットの開発が積極的に行われておりますが,人体接触・損傷に関する評価が不可欠であります.また,事件・事故の科学捜査においては,裁判員制度の導入によって,より高精度な人体損傷の検証・評価が求められています.
しかし,人体損傷評価技術を高度化するためには,①人体代用物(屍体,動物)と生体間の力学応答差,②年齢・性別などによる個体差,③損傷メカニズムの多様さ,といった数多くの困難が存在しています.また,人体損傷に関する貴重なデータが,医学,工学,行政(警察,国土交通省…)の各分野に分散して存在し,情報の集積が行われていないといった構造的な問題も,長らく人体損傷評価技術の高度化を妨げてきました.
そこで,医療機関,警察(科警研,科捜研),企業などと連携し,図1,2に示すような問題に取り組むと共に,医療・福祉機器の開発と安全基準の提案,科学捜査技術の確立と事件・事故の鑑定,さらには,自治体と連携して新たな社会システムの構築に向けた活動[例を図3に示す]を行っています.
また,本研究室では手術支援の研究も行っています.近年,インプラント置換手術では,手術ナビゲーションや手術ロボット等の術中支援システムを用いた高精度な施術が可能となってきており.インプラントの三次元位置姿勢を決める術前計画の重要性が高まっています.本研究室では,事前にコンピュータでインプラントを安全に設置できる領域を解析し,専門医が対話的に三次元手術計画を立案する際,危険な領域に設置しようとした場合には,力覚等で安全な領域に誘導支援する術前計画支援システム(図4)を開発しています.
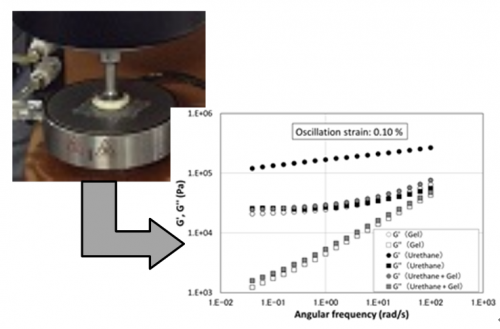
図1 レオメータによる皮膚粘弾性測定
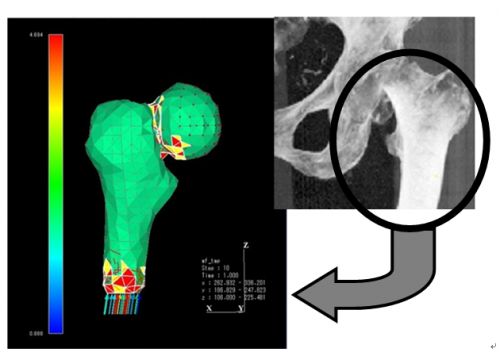
図2 コンピュータシミュレーションによる骨折リスク評価
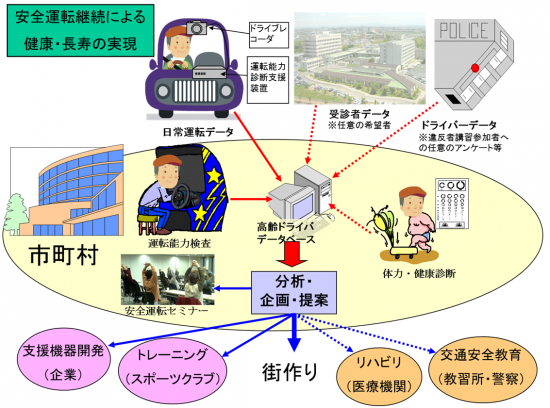
図3 高齢者ドライバーの安全運転を長期間可能にするシステム作り

図4 誘導支援機能付き術前計画システム