
動的システムおよび人間機械系の解析・制御

- 工学部 機械工学科担当
- 教授 野田 善之 (助教 李 信英)
- ホームページ »
- 山梨大学研究者総覧へ »
“社会に役立つ動的システムおよび人間機械系の解析・制御技術の開発”を研究方針として取り組んでいます。 主な研究活動としては、搬送機器や産業ロボットなどの動作プロセスの数理解析を行い、その結果を基にした 制御システムの開発を行っています。また、人間の特性解析に基づいた人に役立つ機械システムの開発にも取 り組んでいます。
具体的な研究テーマは以下の通りです。
① 自動注湯制御システムの開発(図1)
② クレーンや液体搬送などの振動要素を含む搬送システムの制振・高速搬送制御システムの開発
③ 不整地や傾斜地での安全な荷役運搬を可能にする運搬ビークルの開発(図2)
④ 硬組織への手術シミュレータにおける力覚提示システムの開発
⑤ ヒト末梢聴覚器の数理モデル構築(図3)と難治性耳疾患の効果的診断・治療法への応用(詳細へ)
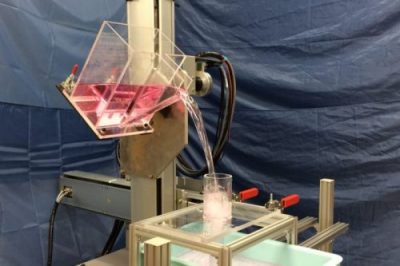
図1 自動注湯ロボット

図2 低重心型平行二輪運搬ビークル

図3 ヒト末梢聴覚器の数理モデル