
ロボットシステムとアクチュエータの研究

- 工学部 メカトロニクス工学科担当
- (教授 寺田 英嗣) 准教授 石田 和義 (教授 牧野 浩二) (助教 孫 瀟)
- ホームページ »
- 山梨大学研究者総覧へ »
当ロボティクス研究室では,ロボットの運動軌跡について解析し,合理的に動くシステムの構築を目標とした研究を行っています.特に産業用ロボット制御手法を中心に研究を進めています.図1,2は本研究室で開発を進めているロボットの例で,複数台のロボットの同期制御により,柔軟物操作(風呂敷包み)を実現するロボットや桃のような柔らかい物体をハンドリングして害虫検査を実現するロボットです.
また近年は医工連携の要望の高まりから,医療支援ロボットシステムに関する研究も進めています.図3はその一例で,歩行リハビリテーションのための人体装着型歩行アシストロボットを開発しています.特に従来のアシストロボットでは人間の膝の動きを正確に再現していませんでした.そこで階段の上り下りにも適用できる能動膝関節機構を開発し,本ロボットシステムに用いています.更にロボット関節のアクチュエータ(駆動装置)に用いられている減速機は近年,高精度化が要求されてきています.これを満足するためにバックラッシ(ガタ)のないメカニズムの研究および開発を進めています.これらのうちの幾つかは実用化されています.図4はその一例でロボット関節,液晶テレビ製造装置,新幹線プラットホームドア等に使用されています.
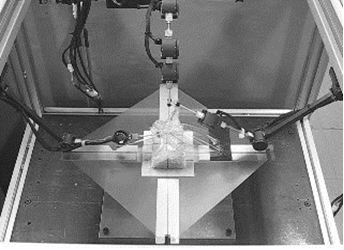
図1 柔軟物操作マルチロボットによる風呂敷包み作業
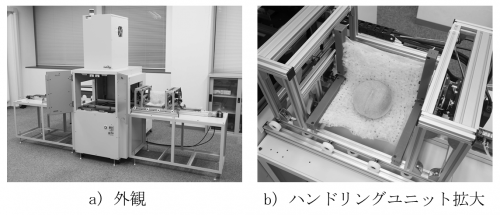
図2 モモシンクイガ検出ロボットシステム

図3 人体装着型歩行リハビリテーション支援ロボット(KAI-R)
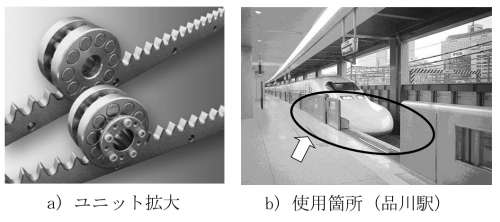
図4 ノーバックラッシメカニズム(トロコイドカム)