自動運転の実現を目指した要素技術の研究

- 工学部 機械工学科担当
- 准教授 孕石 泰丈
- ホームページ »
- 山梨大学研究者総覧へ »
最近、自動運転の自動車の話題を見ることが多くなりました。自動運転は自動車メーカのみならずIT企業のGoogle社も研究・開発していることが知られています。また各種センサ・コンピュータなどの高性能化に伴い、いよいよ実用化を目指した技術検証・研究となっています。
自動車の前方の走行環境を認識するためのセンサにはレーダ、超音波、ビデオカメラなどがあり、コスト・性能などそれぞれ一長一短があります。ビデオカメラは既に多くの市販車に装着され、バックモニタとして、あるいは衝突防止などの運転支援技術として活かされています。しかしカメラ画像にもまだまだ弱点があり、現在の技術のまま自動運転で用いるには不安があります。それを克服するために行っている研究の一例を紹介します。
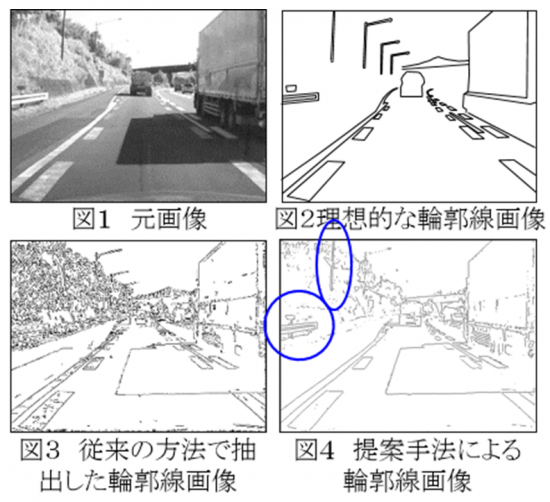
図1は車の前方に見える画像です。ここから、道路白線、ガードレール、他車両あるいは街路灯など走行するうえで必要な情報を認識する必要があります。認識の前段階として、画像中の構造物などの輪郭線を抽出する方法が数多く提案されています。理想的には図2のように必要なものだけの輪郭線が抽出できれば良いのですが、現実は図3のような必要のない輪郭線(ノイズと呼びます)も抽出してしまいます。私たちの研究グループの提案する手法の輪郭線画像を図4に示します。図4では道路白線の上や路肩の土手にあるノイズが大幅に減少していることがわかります。その結果、○で囲んだガードレールや街路灯がくっきり見えるようになり、より図2に示した理想的な輪郭線画像に近づくことが出来ました。